기술이전센터에서 보유하고 있는 지재권을 자세히 소개해드립니다
| 기술명 |
다중회전익 무인비행체 |
 |
||
| 권리구분 | 특허 | |||
| 출원인 | 세종대 산학협력단 | |||
| 대표발명자 | 이름 | 소속학과 | 연구실 | |
| 홍성경 | 항공우주공학전공 |


|
||
| 대표연구분야 | 무인항공기 Autopilot 시스템 설계 관성센서 응용 비행조종장치 검증을 위한 Hardware in the Loop Simulation (HILS) | |||
| 출원번호 | 10-2015-0025403 | 등록번호 | 10-2245397 | |
| 출원일 | 2015-02-23 | 등록일 | 2021-04-22 | |
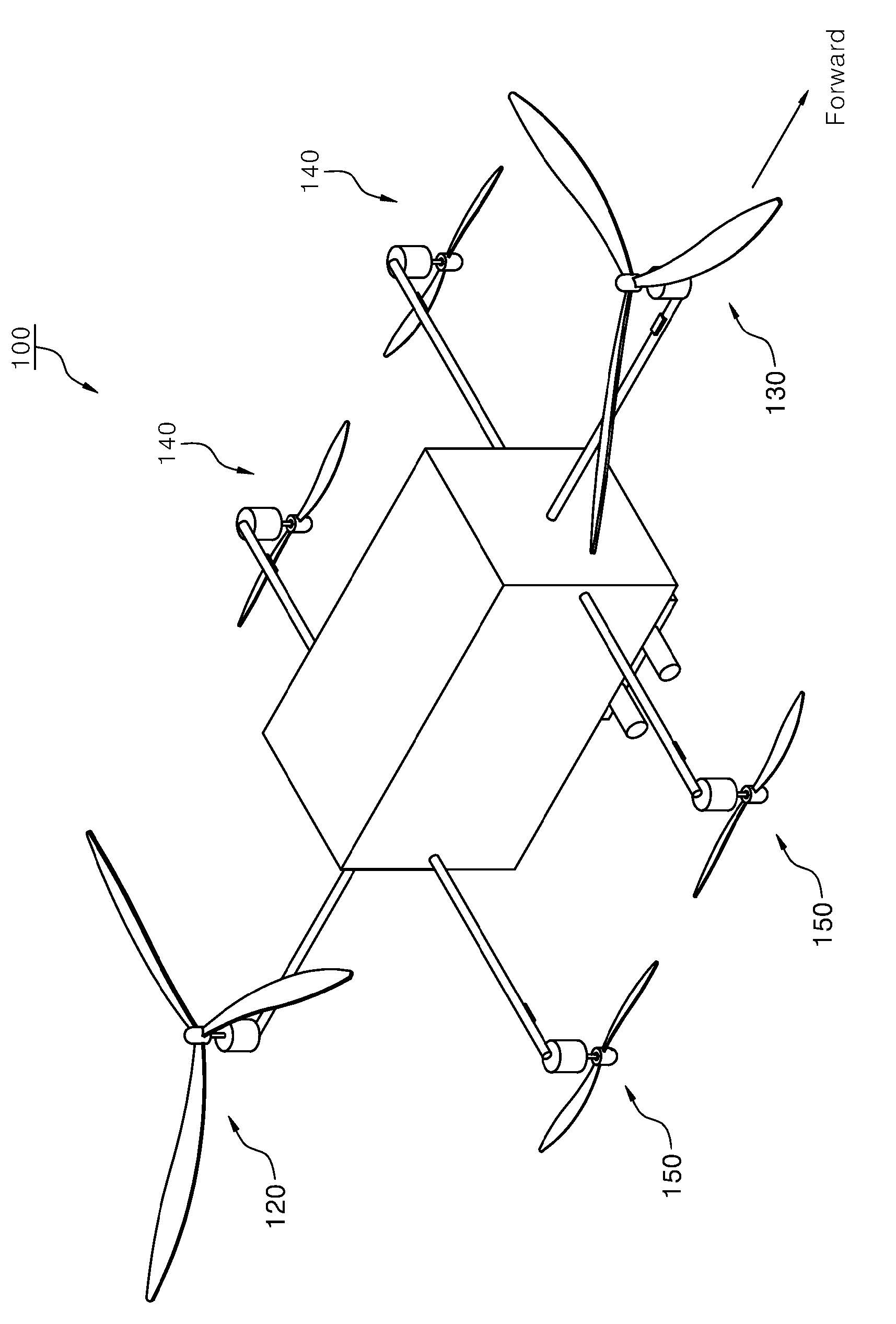
| 특허원문 | 본 발명에 따른 다중회전익 무인비행체는, 다중회전익 무인비행체의 비행을 제어하는 비행제어부를 구비하는 비행본체; 상기 비행본체의 비행방향을 따라 상기 비행본체에 연결된 제1로터부; 및 상기 제1로터부의 사이에 배치되도록 상기 비행본체에 연결된 제2로터부;를 포함하며, 상기 비행본체의 중심에서부터 상기 제1로터부의 회전중심까지의 거리는 상기 비행본체의 중심에서부터 상기 제2로터부의 회전중심까지의 거리 보다 길게 형성됨으로써, 체공시간을 늘이고 외란 대응력을 높일 수 있다. |

|
||
| 상세기술정보 3 | 기술명 | 기술요약 | ||
| 복합 비대칭 형태를 가지는 다중회전익 무인비행체 | 본 발명은 큰 프로펠러와 작은 프로펠러를 모두 구비하되 비대칭 형태로 배치함으로써 무인비행체의 체공시간은 늘이면서도 외란 대응력을 향상시킬 수 있는 다중회전익 무인비행체에 관한 것으로, 무게중심(또는 비행체 중심)을 기준으로 다수개의 로터가 비대칭 형상으로 배치되고 큰 로터와 작은 로터의 기능을 구분한 구조를 가진 다중회전익 무인비행체의 구조에 관한 것이다. |

|
||
| 관련동영상 | ||||
| 기술분류(대) | 기계 | 기술분야 | 기계·우주·항공 | |
| 적용분야 | 멀티 콥터형 무인 항공기 | |||
| 기술명 | |
|---|---|
|
다중회전익 무인비행체 |
|
| 권리구분 | 출원인 |
| 특허 | 세종대 산학협력단 |
| 대표발명자 | |
| 이름 | 소속학과 |
|
홍성경
|
항공우주공학전공 |
| 대표연구분야 | |
| 무인항공기 Autopilot 시스템 설계 관성센서 응용 비행조종장치 검증을 위한 Hardware in the Loop Simulation (HILS) | |
| 출원번호 | 등록번호 |
| 10-2015-0025403 | 10-2245397 |
| 출원일 | 등록일 |
| 2015-02-23 | 2021-04-22 |
| 특허원문 | |
| 본 발명에 따른 다중회전익 무인비행체는, 다중회전익 무인비행체의 비행을 제어하는 비행제어부를 구비하는 비행본체; 상기 비행본체의 비행방향을 따라 상기 비행본체에 연결된 제1로터부; 및 상기 제1로터부의 사이에 배치되도록 상기 비행본체에 연결된 제2로터부;를 포함하며, 상기 비행본체의 중심에서부터 상기 제1로터부의 회전중심까지의 거리는 상기 비행본체의 중심에서부터 상기 제2로터부의 회전중심까지의 거리 보다 길게 형성됨으로써, 체공시간을 늘이고 외란 대응력을 높일 수 있다. | |
|
|
|
| 상세기술정보 | |
| 기술명 | 기술요약 |
| 복합 비대칭 형태를 가지는 다중회전익 무인비행체 | 본 발명은 큰 프로펠러와 작은 프로펠러를 모두 구비하되 비대칭 형태로 배치함으로써 무인비행체의 체공시간은 늘이면서도 외란 대응력을 향상시킬 수 있는 다중회전익 무인비행체에 관한 것으로, 무게중심(또는 비행체 중심)을 기준으로 다수개의 로터가 비대칭 형상으로 배치되고 큰 로터와 작은 로터의 기능을 구분한 구조를 가진 다중회전익 무인비행체의 구조에 관한 것이다. |
|
|
|
| 기술분야 | 적용분야 |
| 기계·우주·항공 | 멀티 콥터형 무인 항공기 |