기술이전센터에서 보유하고 있는 지재권을 자세히 소개해드립니다
| 기술명 |
실내 환경에서 이동하는 무인 지상 이동체의 위치의 추정 |
 |
||
| 권리구분 | 특허 | |||
| 출원인 | 세종대 산학협력단 | |||
| 대표발명자 | 이름 | 소속학과 | 연구실 | |
| 송진우 | 지능기전공학과 |


|
||
| 대표연구분야 | 무인이동체 항법유도제어 센서 융합 및 자율주행항법 드론, 로봇, 수중무인체 등 무인이동체 임베디드시스템 | |||
| 출원번호 | 10-2020-0171036 | 등록번호 | 10-2253184 | |
| 출원일 | 2020-12-09 | 등록일 | 2021-05-11 | |
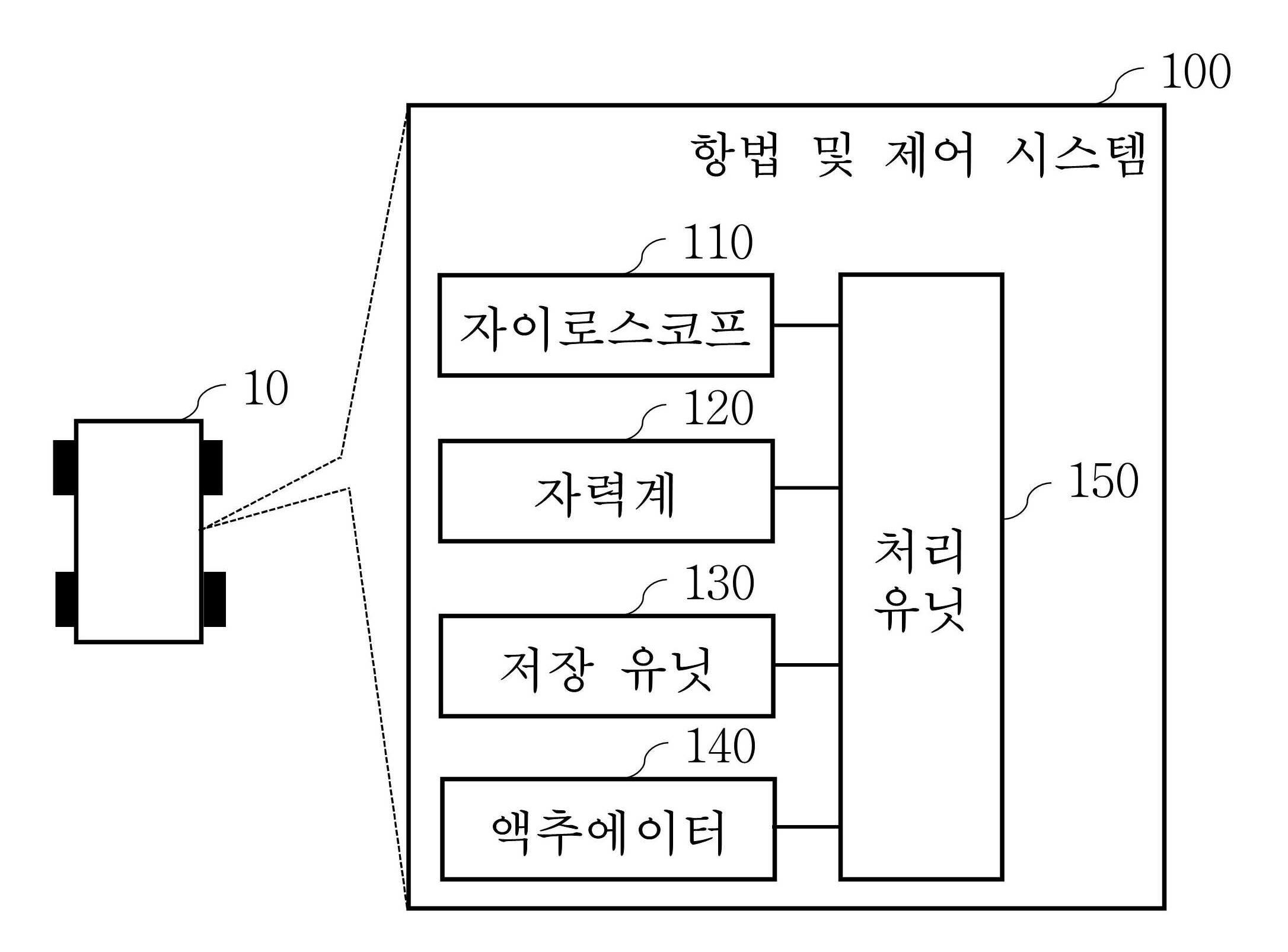
| 특허원문 | 실내 환경에서 제어 입력에 따라 제어된 속도로 이동하는 무인 지상 이동체(Unmanned Ground Vehicle: UGV)의 위치를 추정하는 방법이 제공된다. 개시된 방법은, UGV의 요 각 및 제어된 속도를 기반으로 위치의 데드 레커닝(Dead Reckoning: DR) 추정을 수행하여 위치의 DR 기반 추정치를 산출하는 단계와, 이동 동안의 자기장의 측정을 나타내는 데이터 세트를 실내 환경 내의 복수의 지점에서의 자기장의 사전측정을 나타내는 자기장 지도와 매칭하여 위치의 지도 매칭 기반 추정치를 산출하는 단계와, DR 기반 추정치 및 지도 매칭 기반 추정치 간의 차이를 처리하는 필터링을 수행하여 DR 기반 추정치의 오차를 추정하는 단계를 포함한다. |

|
||
| 상세기술정보 3 | 기술명 | 기술요약 | ||
| [동영상]다중∙융합 센서를 활용한 실내 항법 솔루션 | - 위성 항법 신호를 이용하기 어려운 실내 환경에서 무인 이동체, 드론, 모바일 로봇, 사람 등 다양한 대상체의 위치∙자세를 추정하는 데에 적용될 수 있음 - 특히 다수의 대상체가 존재하는 산업 설비 내지 현장 내부에서 각종 센서 데이터의 융합을 통해 경제적이면서도 신뢰성 있는 센서 기반 항법 솔루션을 제공할 수 있음 - 관성 측정 유닛(IMU)에 기반한 관성 항법에서 지자기 센서를 여러 개 배치하거나 영상 센서와 함께 활용하거나 이동 시 자기장 지도 매칭에 적합하게 측정 데이터를 구성하는 방식으로 복합 센서 데이터를 처리함으로써 더 정확하고 비용 효율적인 실내 항법을 구현하는 기술임 - 특허청구범위 (1) 대상체의 위치를 추정하기 위해, 상이한 높이에서 자기장을 측정하여 실내 영역의 자기장 지도와 매칭하는 것 (2) 무인 비행체의 방위각을 자기장 측정 데이터에 기반하여 판정하되, 영상 데이터로부터 실내 환경의 특징을 검출하여 오차 보상 값을 갱신하는 것 (3) 무인 지상 이동체의 위치를 Dead Reckoning으로 추정하되, 자기장 측정 데이터 세트를 자기장 지도와 매칭하여 오차를 추정하는 것 |

|
||
| 관련동영상 | https://www.youtube.com/watch?v=deqtwFrGvKE |

|
||
| 기술분류(대) | 우주·항공·천문·해양 | 기술분야 | 기계·우주·항공 | |
| 적용분야 | 드론과 같은 무인 비행체의 항법 | |||
| 기술명 | |
|---|---|
|
실내 환경에서 이동하는 무인 지상 이동체의 위치의 추정 |
|
| 권리구분 | 출원인 |
| 특허 | 세종대 산학협력단 |
| 대표발명자 | |
| 이름 | 소속학과 |
|
송진우
|
지능기전공학과 |
| 대표연구분야 | |
| 무인이동체 항법유도제어 센서 융합 및 자율주행항법 드론, 로봇, 수중무인체 등 무인이동체 임베디드시스템 | |
| 출원번호 | 등록번호 |
| 10-2020-0171036 | 10-2253184 |
| 출원일 | 등록일 |
| 2020-12-09 | 2021-05-11 |
| 특허원문 | |
| 실내 환경에서 제어 입력에 따라 제어된 속도로 이동하는 무인 지상 이동체(Unmanned Ground Vehicle: UGV)의 위치를 추정하는 방법이 제공된다. 개시된 방법은, UGV의 요 각 및 제어된 속도를 기반으로 위치의 데드 레커닝(Dead Reckoning: DR) 추정을 수행하여 위치의 DR 기반 추정치를 산출하는 단계와, 이동 동안의 자기장의 측정을 나타내는 데이터 세트를 실내 환경 내의 복수의 지점에서의 자기장의 사전측정을 나타내는 자기장 지도와 매칭하여 위치의 지도 매칭 기반 추정치를 산출하는 단계와, DR 기반 추정치 및 지도 매칭 기반 추정치 간의 차이를 처리하는 필터링을 수행하여 DR 기반 추정치의 오차를 추정하는 단계를 포함한다. | |
|
|
|
| 상세기술정보 | |
| 기술명 | 기술요약 |
| [동영상]다중∙융합 센서를 활용한 실내 항법 솔루션 | - 위성 항법 신호를 이용하기 어려운 실내 환경에서 무인 이동체, 드론, 모바일 로봇, 사람 등 다양한 대상체의 위치∙자세를 추정하는 데에 적용될 수 있음 - 특히 다수의 대상체가 존재하는 산업 설비 내지 현장 내부에서 각종 센서 데이터의 융합을 통해 경제적이면서도 신뢰성 있는 센서 기반 항법 솔루션을 제공할 수 있음 - 관성 측정 유닛(IMU)에 기반한 관성 항법에서 지자기 센서를 여러 개 배치하거나 영상 센서와 함께 활용하거나 이동 시 자기장 지도 매칭에 적합하게 측정 데이터를 구성하는 방식으로 복합 센서 데이터를 처리함으로써 더 정확하고 비용 효율적인 실내 항법을 구현하는 기술임 - 특허청구범위 (1) 대상체의 위치를 추정하기 위해, 상이한 높이에서 자기장을 측정하여 실내 영역의 자기장 지도와 매칭하는 것 (2) 무인 비행체의 방위각을 자기장 측정 데이터에 기반하여 판정하되, 영상 데이터로부터 실내 환경의 특징을 검출하여 오차 보상 값을 갱신하는 것 (3) 무인 지상 이동체의 위치를 Dead Reckoning으로 추정하되, 자기장 측정 데이터 세트를 자기장 지도와 매칭하여 오차를 추정하는 것 |
|
|
|
| 관련동영상 | |
| https://www.youtube.com/watch?v=deqtwFrGvKE | |
|
|
|
| 기술분야 | 적용분야 |
| 기계·우주·항공 | 드론과 같은 무인 비행체의 항법 |