기술이전센터에서 보유하고 있는 지재권을 자세히 소개해드립니다
| 기술명 |
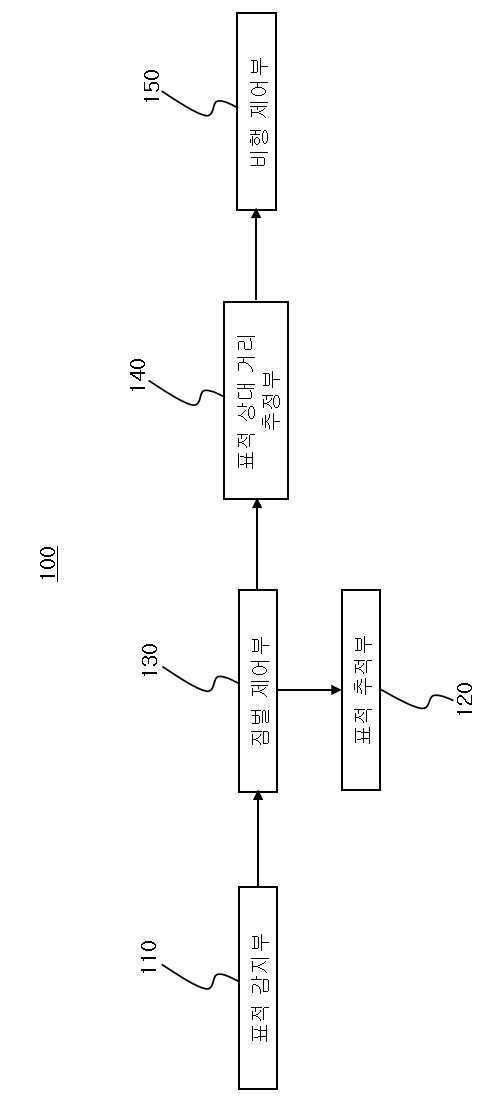
무인비행체의 표적 감지 추적 시스템 |
 |
||
| 권리구분 | 특허 | |||
| 출원인 | 세종대 산학협력단 | |||
| 대표발명자 | 이름 | 소속학과 | 연구실 | |
| 홍성경 | 항공우주공학전공 |


|
||
| 대표연구분야 | 무인항공기 Autopilot 시스템 설계 관성센서 응용 비행조종장치 검증을 위한 Hardware in the Loop Simulation (HILS) | |||
| 출원번호 | 10-2020-0001295 | 등록번호 | 10-2307079 | |
| 출원일 | 2020-01-06 | 등록일 | 2021-09-24 | |
| 특허원문 | 본 발명은, 드론 또는 멀티콥터 등 무인비행체의 자동 정밀 착륙 수행 동안 표적을 추적하기 위한 IR 표적의 감지 및 추적 시스템에 관한 것으로, 타겟 추적을 위한 롤, 틸트 구동이 가능한 2축 짐벌과 감지 센서로부터 제공되는 표적의 픽셀 좌표를 이용하여 짐벌을 제어하고 짐벌의 자세를 측정할 수 있는 짐벌제어 보드로 구성됩니다. |

|
||
| 상세기술정보 3 | 기술명 | 기술요약 | ||
| 무인비행체에 마련된 짐벌 구동 IR센서를 이용하여 IR표적을 탐지 및 추적함으로써 표적에 자동 정밀 착륙이 가능한 시스템 | 본 발명은 무인비행체가 배터리 충전 등을 위해 협소한 착륙지점에 착륙시 바람이나 외란에 의해 착륙이 불가능해지는 것을 방지하기 위해, 영상센서(IR센서)를 탑재한 짐벌을 이용하여 착륙하는 동안 착륙지점에 마련된 IR표적을 탐지 추적함으로써 무인비행체가 착륙지점에 자동 정밀 착륙할 수 있게 하는 시스템에 관한 것이다. |

|
||
| 관련동영상 | ||||
| 기술분류(대) | 우주·항공·천문·해양 | 기술분야 | 기계·우주·항공 | |
| 적용분야 | 드론/멀티콥터/회전익 무인항공기의 자율비행제어 분야 | |||
| 기술명 | |
|---|---|
|
무인비행체의 표적 감지 추적 시스템 |
|
| 권리구분 | 출원인 |
| 특허 | 세종대 산학협력단 |
| 대표발명자 | |
| 이름 | 소속학과 |
|
홍성경
|
항공우주공학전공 |
| 대표연구분야 | |
| 무인항공기 Autopilot 시스템 설계 관성센서 응용 비행조종장치 검증을 위한 Hardware in the Loop Simulation (HILS) | |
| 출원번호 | 등록번호 |
| 10-2020-0001295 | 10-2307079 |
| 출원일 | 등록일 |
| 2020-01-06 | 2021-09-24 |
| 특허원문 | |
| 본 발명은, 드론 또는 멀티콥터 등 무인비행체의 자동 정밀 착륙 수행 동안 표적을 추적하기 위한 IR 표적의 감지 및 추적 시스템에 관한 것으로, 타겟 추적을 위한 롤, 틸트 구동이 가능한 2축 짐벌과 감지 센서로부터 제공되는 표적의 픽셀 좌표를 이용하여 짐벌을 제어하고 짐벌의 자세를 측정할 수 있는 짐벌제어 보드로 구성됩니다. | |
|
|
|
| 상세기술정보 | |
| 기술명 | 기술요약 |
| 무인비행체에 마련된 짐벌 구동 IR센서를 이용하여 IR표적을 탐지 및 추적함으로써 표적에 자동 정밀 착륙이 가능한 시스템 | 본 발명은 무인비행체가 배터리 충전 등을 위해 협소한 착륙지점에 착륙시 바람이나 외란에 의해 착륙이 불가능해지는 것을 방지하기 위해, 영상센서(IR센서)를 탑재한 짐벌을 이용하여 착륙하는 동안 착륙지점에 마련된 IR표적을 탐지 추적함으로써 무인비행체가 착륙지점에 자동 정밀 착륙할 수 있게 하는 시스템에 관한 것이다. |
|
|
|
| 기술분야 | 적용분야 |
| 기계·우주·항공 | 드론/멀티콥터/회전익 무인항공기의 자율비행제어 분야 |