기술이전센터에서 보유하고 있는 지재권을 자세히 소개해드립니다
| 기술명 |
다중 자기장 센서 배열을 이용한 무인 이동체의 움직임의 추정 |
 |
||
| 권리구분 | 특허 | |||
| 출원인 | 세종대 산학협력단 | |||
| 대표발명자 | 이름 | 소속학과 | 연구실 | |
| 송진우 | 지능기전공학과 |


|
||
| 대표연구분야 | 무인이동체 항법유도제어 센서 융합 및 자율주행항법 드론, 로봇, 수중무인체 등 무인이동체 임베디드시스템 | |||
| 출원번호 | 10-2021-0044414 | 등록번호 | 10-2258188 | |
| 출원일 | 2021-04-06 | 등록일 | 2021-05-24 | |
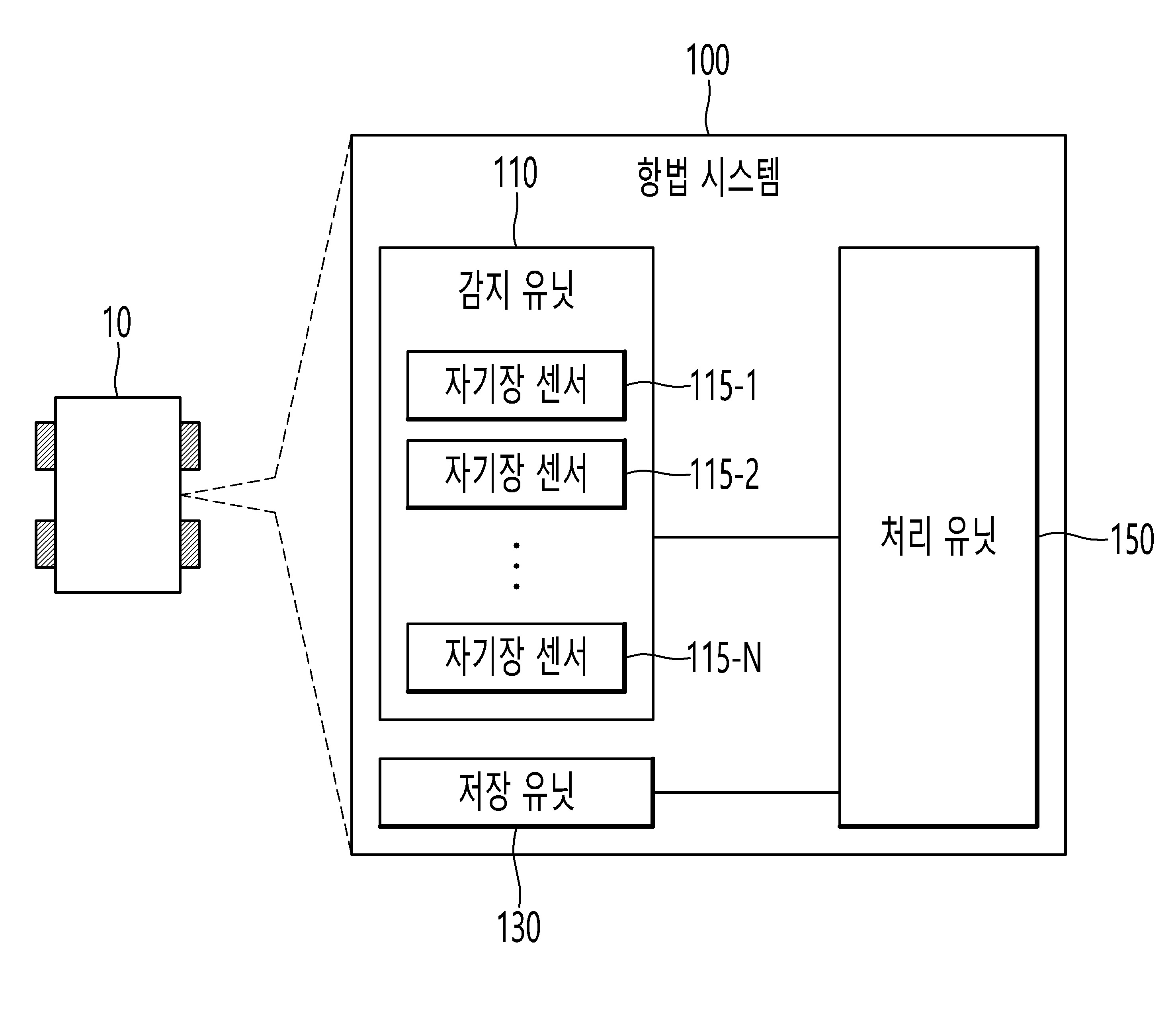
| 특허원문 | 무인 이동체(Unmanned Vehicle: UV)가 제공된다. 개시된 UV는, 전후 간격만큼 서로 이격되고 UV의 이동체 중심으로부터 균일하게 이격된 제1 쌍의 자기장 센서 및 전후 간격만큼 서로 이격되고 이동체 중심으로부터 균일하게 이격된 제2 쌍의 자기장 센서를 포함하는 복수의 자기장 센서(제1 쌍 및 제2 쌍은 UV의 직진 방향으로 평행하게 배열됨)와, UV의 움직임을 추정하는 동작을 수행하는 처리 유닛을 포함하는데, 동작은, 제1 쌍의 자기장 센서 중의 제1 선행 자기장 센서 및 제2 쌍의 자기장 센서 중의 제2 선행 자기장 센서가 동일한 초기 시점에 각각 통과한 제1 지점 및 제2 지점을 제1 쌍의 자기장 센서 중의 제1 후행 자기장 센서 및 제2 쌍의 자기장 센서 중의 제2 후행 자기장 센서가 동일한 추후 시점에 각각 통과하는지 또는 두 상이한 각자의 추후 시점에 각각 통과하는지를 판정하는 것과, 제1 지점 및 제2 지점을 제1 후행 자기장 센서 및 제2 후행 자기장 센서가 두 상이한 각자의 추후 시점에 각각 통과한다고 판정된 경우에 UV의 회전을 추정하는 것을 포함한다. |

|
||
| 상세기술정보 3 | 기술명 | 기술요약 | ||
| 다중 자기장 센서를 이용한 무인 이동체 항법 시스템 | - 무인 이동체의 회전 추정에 관련된 것으로서, 무인 이동체의 항법 시스템에 적용될 수 있음 - 대칭적으로 배열된 자기장 센서 쌍을 이용하여 선행 센서의 통과 지점을 후행 센서가 통과하는 시점을 비교하면 무인 이동체의 움직임이 직선 운동인지 또는 회전 운동인지를 추정할 수 있음 - 무인 이동체의 항법 시스템에서, 전후 간격만큼 이격되고 무인 이동체의 중심으로부터 균일하게 이격된 자기장 센서 두 쌍이 직진 방향으로 평행하게 배열되고, 각 쌍의 선행 자기장 센서가 동일한 초기 시점에 각각 통과한 지점을 각 쌍의 후행 자기장 센서가 각각 통과하는 시점이 상이하다고 판정된 경우 무인 이동체의 회전이 추정됨 |

|
||
| 관련동영상 | ||||
| 기술분류(대) | 우주·항공·천문·해양 | 기술분야 | 기계·우주·항공 | |
| 적용분야 | 드론 | |||
| 기술명 | |
|---|---|
|
다중 자기장 센서 배열을 이용한 무인 이동체의 움직임의 추정 |
|
| 권리구분 | 출원인 |
| 특허 | 세종대 산학협력단 |
| 대표발명자 | |
| 이름 | 소속학과 |
|
송진우
|
지능기전공학과 |
| 대표연구분야 | |
| 무인이동체 항법유도제어 센서 융합 및 자율주행항법 드론, 로봇, 수중무인체 등 무인이동체 임베디드시스템 | |
| 출원번호 | 등록번호 |
| 10-2021-0044414 | 10-2258188 |
| 출원일 | 등록일 |
| 2021-04-06 | 2021-05-24 |
| 특허원문 | |
| 무인 이동체(Unmanned Vehicle: UV)가 제공된다. 개시된 UV는, 전후 간격만큼 서로 이격되고 UV의 이동체 중심으로부터 균일하게 이격된 제1 쌍의 자기장 센서 및 전후 간격만큼 서로 이격되고 이동체 중심으로부터 균일하게 이격된 제2 쌍의 자기장 센서를 포함하는 복수의 자기장 센서(제1 쌍 및 제2 쌍은 UV의 직진 방향으로 평행하게 배열됨)와, UV의 움직임을 추정하는 동작을 수행하는 처리 유닛을 포함하는데, 동작은, 제1 쌍의 자기장 센서 중의 제1 선행 자기장 센서 및 제2 쌍의 자기장 센서 중의 제2 선행 자기장 센서가 동일한 초기 시점에 각각 통과한 제1 지점 및 제2 지점을 제1 쌍의 자기장 센서 중의 제1 후행 자기장 센서 및 제2 쌍의 자기장 센서 중의 제2 후행 자기장 센서가 동일한 추후 시점에 각각 통과하는지 또는 두 상이한 각자의 추후 시점에 각각 통과하는지를 판정하는 것과, 제1 지점 및 제2 지점을 제1 후행 자기장 센서 및 제2 후행 자기장 센서가 두 상이한 각자의 추후 시점에 각각 통과한다고 판정된 경우에 UV의 회전을 추정하는 것을 포함한다. | |
|
|
|
| 상세기술정보 | |
| 기술명 | 기술요약 |
| 다중 자기장 센서를 이용한 무인 이동체 항법 시스템 | - 무인 이동체의 회전 추정에 관련된 것으로서, 무인 이동체의 항법 시스템에 적용될 수 있음 - 대칭적으로 배열된 자기장 센서 쌍을 이용하여 선행 센서의 통과 지점을 후행 센서가 통과하는 시점을 비교하면 무인 이동체의 움직임이 직선 운동인지 또는 회전 운동인지를 추정할 수 있음 - 무인 이동체의 항법 시스템에서, 전후 간격만큼 이격되고 무인 이동체의 중심으로부터 균일하게 이격된 자기장 센서 두 쌍이 직진 방향으로 평행하게 배열되고, 각 쌍의 선행 자기장 센서가 동일한 초기 시점에 각각 통과한 지점을 각 쌍의 후행 자기장 센서가 각각 통과하는 시점이 상이하다고 판정된 경우 무인 이동체의 회전이 추정됨 |
|
|
|
| 기술분야 | 적용분야 |
| 기계·우주·항공 | 드론 |